Основной идеей при построении представляемых вирпильскому сообществу педалей была идея весьма спорная - сделать педали чисто "авиационные" и "современные" - авиационные в том известном смысле, что перемещение одной педали в требуемом направлении приводит к перемещению другой педали в противоположном направлении ("автомобильные" перемещаются независимо одна от другой), и "современные" - перемещающиеся практически только в продольном направлении, как, например, на МИГ-29 или СУ-27. Последнее требование (еще раз: весьма спорное для педалей для авиасимов!) повлекло за собой ряд технических решений, представляемых ниже.
|

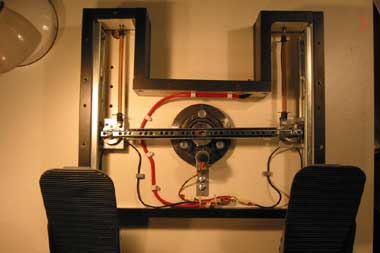
На фото 1 и 2 представлен общий вид педалей. На фото 3 - общий вид привода.
Отмечу, что угол наклона площадок педалей и расстояние между ними были подобраны опытным путем, исходя как из моих личных "весогабаритных параметров", так и из особенностей моей "летной кабины".
Так, у меня под полкой компьтерного стола, где установлен монитор, есть специальная нога-подпорка. Поэтому в корпусе педалей появился необязательный в общем случае вырез.
В качестве направляющих для продольного перемещения педалей ("взад-вперед") были использованы направляющие для выдвижных ящиков современной мебели, с расчетной нагрузкой 40 кг.

Эти направляющие состоят из внешней детали, перемещающейся внутри нее на плоских шариковых подшипниках средней детали, и третьей детали, перемещающихся уже внутри средней. При доработке под направляющие педалей третья деталь удаляется.
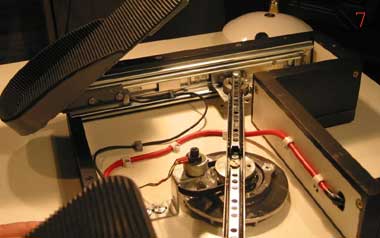
К внутренней детали крепится вырезанный из угольника держатель, а на него уже устанавливается площадка педали. Внешний вид направляющих до (верхняя) и после доработки (нижняя) и держатели площадок показаны на фото 4. Работа привода педалей показана на фото 5, 6, 7.
Отмечу, что даже такой выбор (нагрузка 40 кг!) оказался не лучшим, жесткость конструкции в этой части не более чем удовлетворительна, лучше были бы направляющие типа каретки у пишущих машинок - вот там зазоры, в силу фрезеровки сопрягающихся деталей, минимальны, поэтому и жесткость была бы такой, как надо для изделия, управляемого ногами. При номинальной длине направляющих 310 мм полный ход педалей составил 116 мм, т.е. примерно 58 мм вперед-назад от нейтрального положения.
|
Выбранный вариант позволяет использовать весьма простую (только по схеме!) конструкцию для преобразования чисто продольного движения педалей во вращательное движение датчика. Приводным элементом датчика является поперечная траверса, передающая движение на центральный поворотный узел. Траверса собрана из двух направляющих для ящиков, но рассчитанных на гораздо меньшую нагрузку (эти направляющие состоят только из двух деталей) и обеспечивает "авиационное" движение педалей. Траверса состоит из одной "внешней" детали и двух внутренних от направляющих (см. фото 3 и фото 7).

Работа траверсы понятна из фото 5, 6, 7: при движении одной педали вперед, подвижные части траверсы "вытягиваются" из общей направляющей ("внешней" детали), тем самым конструкция обеспечивает переменную длину траверсы - понятно, что при продольном перемещении педалей расстояние между точками крепления траверсы на левой и правой боковых направляющих увеличивается по сравнению с расстоянием при нейтральном положении педалей.
При этом противоположный конец траверсы передает усилие на противоположную направляющую, обеспечивая движение установленной на ней педали в противоположном направлении. Узел сопряжения подвижных частей траверсы с подвижными частями боковых направляющих выполнен на основе шарикоподшипника, конструкция узла - на фото 5,6,7 и крупно - на фото 8.. |

Траверса установлена на центральный поворотный узел. Конструкция узла заимствована у БоРады (нижайший ему поклон). Основой узла является шарикоподшипник от электродвигателя в оправке, вырезанной из крышки электродвигателя (фото 9).
Оправку я вырезал обычным электролобзиком, но пилка - "по металлу". На фото 9 на левой верхней детали видны отверстие для вставки пилки и пробный разрез. После пробы из второй крышки была вырезана оправка для подшипника - в правом нижнем углу фото.

Во внутреннее кольцо подшипника установлен специальной формы передаточный шкив, он хорошо виден на фото 7.
С него с помощью резинового ленточного пассика движение передается на узел датчика (также на фото 7) на основе штатного переменного резистора джойстика TM Fox 2 Pro USB. Резистор джоя установлен на обычный переменный резистор серии СП, при этом СП использован как промежуточный механизм для передачи вращения на резистор джоя.
На ручке резистора СП закреплен шкив (он из оргстекла, под рукой не было другого легкого в обработке материала нужной толщины). Резистор штатно включен в схему джоя, тем самым реализовано управление 4-й осью дополнительного управляющего устройства для ИЛ-2 (т. е. рысканием) педалями.
Должен сказать, что пока не подобрал оптимальные передаточный коэффициент и тип резистора датчика (понятно, что передаточный коэффициент определяется диаметром шкива на ручке промежуточного резистора СП). Но в любом случае это должен быть переменный резистор номиналом 100 ком - именно такой применен в джое в качестве датчика 4-й оси (рыскание).
|
Центрирование. Обеспечивается резиновыми жгутами, собранными из рыболовных резиновых нитей (решпект за идею mr.White'у) диаметром примерно 0,5 мм.
При сборке такого жгута число нитей определяется опытным путем (когда усилие нажатия педали кажется подходящим) плюс еще 3-5 нитей: после сборки жгута добавить нити непросто, а вот срезать одну-две лишние - секундное дело.
Конструктивное решение очевидно из фото 3. На фото 10 показана конструкция резинового жгута и его крепление на узле сопряжения.

Второй конец жгута "ввинчивается" во втулку, вставляемую в отверстие в корпусе
(см. фото 2).
Натяжение жгутов в небольшом диапазоне регулируемое за счет резьбового соединения винта и втулки, тем самым производится точное центрирование педалей. При регулировке закручивается именно втулка, жгут остается в состоянии как на фото 11.
Последнее "ноу-хау" этой конструкции - кнопки на педалях. Кнопки включены по схеме "И", установлены так, что срабатывают при достаточно легком нажатии, и, при нажатии ступнями обеих кнопок, в пульт выдается команда, интерпретируемая как "Колесные тормоза". Кнопки прикрыты защитными кожухами, см. фото 2.
|

Принципиальные недостатки данной схемы.
Главный - это неуравновешенность всей конструкции.
При постановке ступней ног на педали, вся конструкция заваливается вперед. Поэтому на заднюю часть корпуса нужно либо установить неслабый груз, либо (мой вариант) некие упоры с упором в верхнюю крышку компьютерного стола (или в какую-то аналогичную его деталь).
Эта схема исключает применение в качестве сиденья вращающегося кресла - понятно, что сиденье в этом случае должно быть жестко закреплено относительно педалей, поэтому на полеты кресло нужно заменять на обычный стул.
Из мелких недостатков - малая ширина педалей (что вызвано малой шириной покупных деталей-заготовок для площадок педалей). 100 мм (как у меня) - это предельно допустимый минимум, для ноги моего 42-го размера лучше было бы 110-120 мм.
. |
 
И самое главное. Долгое время используя в качестве руля направления 4-ю ось такого прекрасного джоя, как MS Precision Pro, я привык именно к прецезионному управлению рысканием. Попытка с ходу столь же уверенно использовать педали провалилась.
Поэтому предстоит как долгое переучивание с джоя на педали, так и эксперименты в поисках наилучшей конструкции датчика, а то и создание новой конструкции, на этот раз более близкой к известной всем конструкции mr.White'а, но с кое-какими моими находками. Не исключаю, что вообще откажусь от педалей, хотя это решение совсем уж слабачное…
Приношу извинения за качество некоторых фото - возможность поснимать цифровиком появилась, когда педали были уже полностью готовы, поэтому заготовки сняты "пленочником".
Огромная благодарность моему однополчанину и другу Гаденышу, благодаря которому вы и познакомились с моей работой.
Юрий СПБ, oldpilot@mail.ru
Перечень фото:
1. Фото 1. Вид спереди слева.
2. Фото 2. Вид сзади.
3. Фото 3. Общий вид привода
4. Фото 4. Направляющие и держатели
5. Фото 5. Нейтральное положение
6. Фото 6. Дана вперед правая педаль
7. Фото 7. Дана вперед левая педаль
8. Фото 8. Узел сопряжения
9. Фото 9. Заготовки для центрального узла
10. Фото 10. Резиновый жгут
11. Фото 11. Резиновый жгут в сборе
|
